Robots d'intérieur
EROS - EOLE
Description - Missions
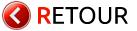
- EROS (Engin Robotisé d’Observation et de Surveillance)
- EOLE (Engin d’Observation et de Localisation dans l’Environnement).
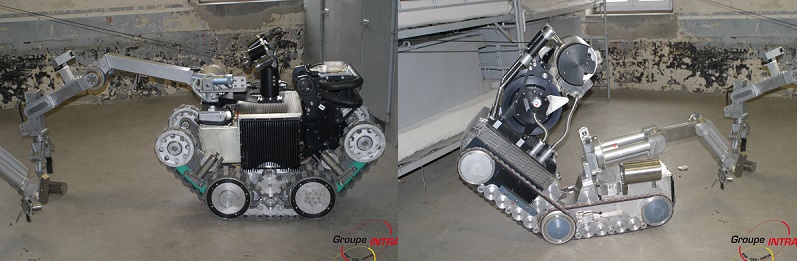
Engins de reconnaissance et d’intervention légère à l’intérieur des bâtiments, utilisés dès lors que l’ambiance radiologique devient hostile pour l’homme, ils sont conçus sur une base chenillée (EROS deux corps, EOLE un corps central et deux flippers), dotés des moyens nécessaires à la conduite téléopérée et capables d'évoluer en milieu industriel (monter ou de descendre des escaliers, franchir des obstacles, monter des escaliers et ouvrir des portes). Ils sont autonomes en énergie mais, pour garantir le bon déroulement de la mission à l’intérieur de bâtiments imperméables aux ondes hertziennes, le contrôle commande reste assuré par un câble coaxial qui est déroulé au fil de la progression dans les locaux. Ils peuvent évoluer dans l’obscurité grâce à leur éclairage autonome et sont équipés d’un bras manipulateur électrique terminé par une pince qui permet d’effectuer des manœuvres simples.
En phase de reconnaissance, EROS et EOLE ont pour mission de recueillir et transmettre des informations :- Vidéos d’inspection visuelle de pompes, vannes, tableaux électriques, indicateurs divers
- Lecture de données sur manomètres, cadrans ou écrans, examen de l’état de voyants de signalisation, de hublots...
- Mesures de température, d’ambiance sonore, de débit de dose de rayonnement ionisant…
- Ouvrir et fermer des portes non verrouillées, avec ou sans groom
- Ouvrir et fermer des vannes à commandes électriques (action sur un bouton poussoir) ou des vannes manuelles,
- Manœuvrer des organes électriques : disjoncteurs, contacteurs…,
- Récupérer des débris ou prélever des échantillons,
- Effectuer des mesures nucléaires à l’aide de capteurs adaptés (radiamètre, …,)
- Mettre en œuvre des outils divers adaptés à ses capacités (disqueuse, perceuse...),
- Assister d’autres engins en téléopération par l’apport d’une vision extérieure, d’un moyen de manipulation supplémentaire.
Simulateur de pilotage
Depuis 2015, il permet d’entrainer les pilotes dans un environnement très proche de la salle de formation en économisant les engins d’intérieur. Le poste de pilotage est identique au poste réel. Le formateur peut intervenir directement pour simuler des pannes de matériel et évaluer les réactions du pilote.

Caractéristiques
Pilotage
Deux types de poste de pilotage qui peuvent êtreutilisés suivant la nature et le lieu de l’intervention :
- Un poste autonome constitué d’une baie principale et de trois écrans LCD repliables. Cet ensemble, facilement transportable, permet de positionner le poste de pilotage à l’intérieur d’un bâtiment, au plus près du local dans lequel l’engin doit intervenir
- Un poste autonome embarqué dans un véhicule aménagé. Ce poste est utilisé lorsque l’accès à l’intérieur du bâtiment n’est pas possible et que l’intervention doit être téléopérée depuis l’extérieur

Nota : Les deux véhicules aménagés en poste de pilotage sont polyvalents et peuvent aussi être utilisés pour le pilotage des engins d’extérieur de type ERASE en version transmission numérique de 3ème génération. Ils ne peuvent pas être utilisés en zone contaminée.
Interface externe

En cas d’accident, le centre de gestion de crise peut être destinataire, via la base arrière et une liaison par satellite, des vidéos de l’opération en cours.
Les caractéristiques détaillées des engins d’intérieur sont présentées dans le tableau ci-dessous :
EOLE est issu de la modification des engins de reconnaissance intérieur du Groupe INTRA : ERII (base REMOTEC ANDROS V).
EROS est issu des développements effectués sur les bases CENTAURE du CEA.